De technologische ontwikkelingen in de auto-industrie zijn niet te stoppen. Auto’s kunnen zelf inparkeren, waarschuwen de bestuurder voor gevaar en grijpen zelfstandig in als dat nodig is. Dat is goed voor de verkeersveiligheid en makkelijk voor de bestuurder. De volgende stap is de volledig zelfrijdende auto. Of niet?
Niet meer zelf hoeven stappen, trappen, duwen of paarden voor de koets spannen: 120 jaar geleden ontketende de eerste auto een mobiliteitsrevolutie. In de afgelopen eeuw is de auto zelf getransformeerd van een ‘automobiel’ tot een hypermodern vervoermiddel vol technologisch vernuft.
Toch moeten we de belangrijkste taken nog altijd zelf uitvoeren: gas geven, sturen, op tijd remmen en vooral: goed opletten. En dat heeft gevolgen voor de verkeersveiligheid. Want mensen zijn soms afgeleid, vermoeid, onder invloed of ze rijden te hard – fouten maken is menselijk. Een volledig autonome, zelfrijdende auto heeft daar geen last van. Dat kan het verkeer een stuk veiliger maken. Zorgt de zelfrijdende auto daarmee voor een nieuwe revolutie? En wanneer is het dan zover? En ook niet onbelangrijk: willen we die zelfrijdende auto eigenlijk wel?
Niveaus van automatisering
Van automatisch inparkeren tot cruisecontrol – veel moderne auto’s zijn al voorzien van (deels) zelfrijdende technologie. De Society of Automotive Engineers (SAE) heeft zes niveaus van automatisering van de rijtaak vastgesteld, die internationaal als standaard worden gehanteerd:
- Niveau 0: geen automatisering. De bestuurder kan worden geassisteerd door middel van waarschuwingssystemen.
- Niveau 1: bestuurdersondersteuning. De bestuurder wordt ondersteund bij het sturen, gas geven of remmen.
- Niveau 2: gedeeltelijke automatisering. Onder specifieke rijomstandigheden is het sturen en/of het versnellen/remmen geautomatiseerd. De bestuurder voert alle overige dynamische taken zelf uit en kan het systeem ‘overrulen’.
- Niveau 3: conditionele automatisering. In bepaalde rijomstandigheden (bijvoorbeeld een rustige snelweg) wordt het voertuig volledig bestuurd door het systeem. De bestuurder moet wel alert blijven om taken van het systeem te kunnen overnemen.
- Niveau 4: hoge mate van automatisering. Alleen in specifieke situaties wordt het voertuig volledig bestuurd door het systeem, zonder dat de bestuurder het hoeft over te nemen.
- Niveau 5: volledige automatisering. Hetzelfde als bij niveau 4, maar dan overal en in alle rijomstandigheden.
Stap voor stap
De ontwikkeling naar een volledig zelfrijdende auto gaat stap voor stap. Hieronder bespreken we de ontwikkelingen per SAE-niveau.
Niveau 0 en 1: ADAS (Advanced Driver Assistance Systems)
Op deze niveaus zijn al vrij veel systemen op de markt. Zo zijn er systemen die waarschuwen als je te hard rijdt (ISA) of van de weg dreigt te raken (Lane Departure Warning Systems, LDWS). Andere systemen helpen bijvoorbeeld met afstand bewaren (FCW, ACC) of grijpen in (door te remmen) als de bestuurder dat zelf niet doet (AEB).
In de praktijk weten bestuurders vaak niet precies welke systemen er in hun auto zitten, wat ze doen en of ze aan staan. Een Nederlandse enquête onder 1.355 zakelijke leaserijders laat zien dat veel veiligheidssystemen daardoor niet worden gebruikt. Het leeuwendeel van de ondervraagden heeft cruisecontrol of navigatie en deze systemen worden door bijna alle ondervraagden gebruikt. Ruim 100 van de 1.355 ondervraagden hebben auto’s met Lane Departure Warning Systems (LDWS), die waarschuwen als je onbedoeld buiten je rijstrook terechtkomt, of ACC (Adaptive Cruise Control). Het blijkt dat slechts 5% tot 10% van de bestuurders weet dat een dergelijk systeem in hun auto zit. Als ze het weten, gebruiken ze het ook.
Niveau 2: gedeeltelijk zelfrijdend
Het bekendste voorbeeld van dit niveau is Autopilot van Tesla. Bij de meeste recente versie moet de bestuurder regelmatig het stuur aanraken om te laten weten dat hij alert is, anders stopt de auto. Bij eerdere versies van Autopilot kon de bestuurder in principe de krant gaan lezen of gaan slapen. Naar aanleiding van een dodelijk ongeval met deze volledig zelfrijdende versie, heeft de National Highway Traffic Safety Administration (NHTSA) onderzoek gedaan naar ongevallen met en zonder Tesla’s Autopilot. Daarbij ging het specifiek om ‘Autosteer’, de zelfsturende functionaliteit van Autopilot, die bijvoorbeeld ook automatisch inparkeren mogelijk maakt
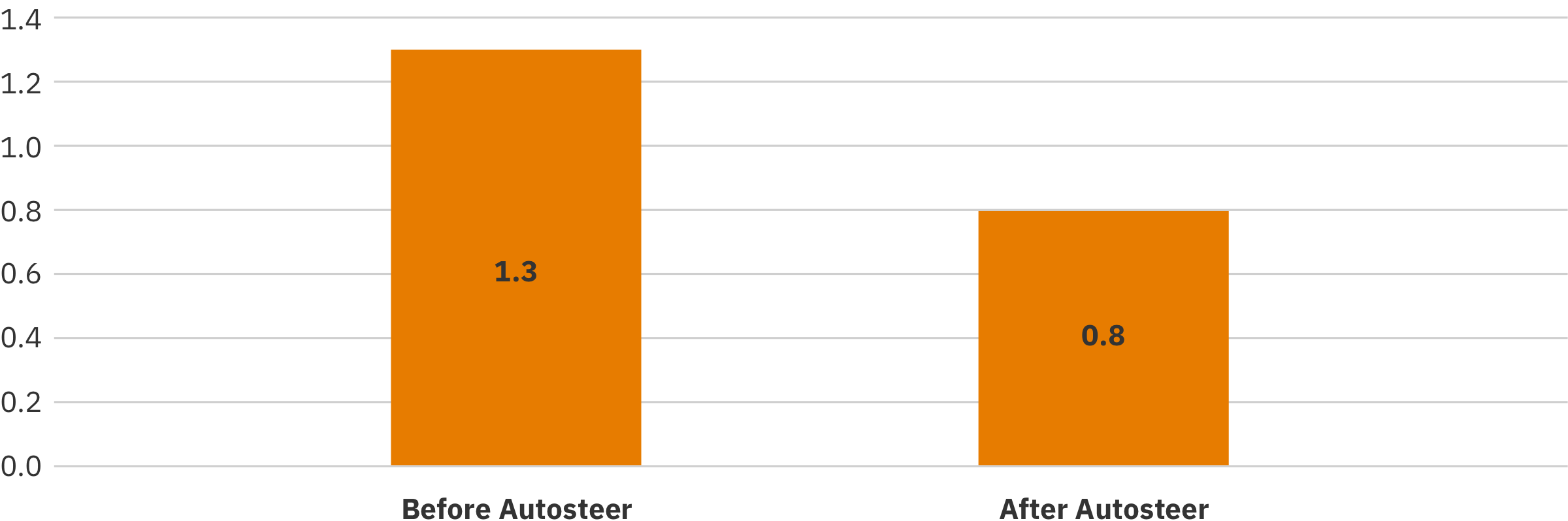
Op het eerste gezicht lijkt het erop dat Autosteer tot 40% minder ongevallen leidt. Hiervoor is onderzoek gedaan tijdens een voor- en naperiode, maar zonder controlegroep. Dat laatste is belangrijk, omdat de algemene verkeersveiligheid ook verandert en we zonder controlegroep dus geen harde conclusies kunnen trekken. Mogelijk speelden ook andere factoren een rol. Zo geeft Tesla regelmatig software-updates, bijvoorbeeld om het remsysteem of de ACC te verbeteren.
Een ander onderdeel van Autopilot is het automatische remsysteem AEB. Onderzoek van het Amerikaanse Insurance Institute for Highway Safety (IIHS) uit 2016 laat zien dat de combinatie van AEB, ACC en Forward Collision Warning (FCW), zoals nu bij Autopilot het geval is, leidt tot 42% procent minder kop-staart aanrijdingen met letsel. Dit suggereert dan weer dat het effect van 40% minder ongevallen met Tesla's Autopilot alleen door deze combinatie van AEB en ACC ligt, en niet door Autosteer, maar ook daarvoor ontbreken voldoende gegevens. De NHTSA concludeert dan ook zelf niet dat de zelfsturende functie van Autopilot tot 40% minder ongevallen leidt.
Vanwege concurrentieoverwegingen is het begrijpelijk dat de auto-industrie gegevens over dit onderwerp niet openbaar deelt of erover laat publiceren in wetenschappelijke tijdschriften. Maar jammer is het wel, want nu weten we eigenlijk nog niets.
Niveau 3: zelfrijdend onder voorwaarden
Op dit niveau kan de bestuurder in principe iets anders gaan doen, maar moet hij wel alert blijven. Het zelfrijdende systeem kan namelijk de bestuurder vragen om het stuur weer over te nemen (transition of control). De vraag is hoe veilig dat is. Uit een rijsimulatoronderzoek van SWOV blijkt dat het zeker zes seconden duurt voordat de bestuurder de auto weer goed onder controle heeft. Dat betekent dat een auto op de snelweg bij 120 km/uur een paar honderd meter vooruit moet kunnen ‘kijken’ – een lastige opgave. Systemen van dit niveau zijn dan ook nog niet op de markt. Het Europese verkeersveiligheidsplatform FERSI adviseert om dit niveau over te slaan bij de verdere ontwikkelingen richting volledig zelfrijdende systemen.
Niveau 4: volledig zelfrijdend in specifieke omstandigheden
Op dit niveau kan een auto in specifieke omstandigheden volledig zelfstandig rijden, zonder dat de bestuurder het hoeft over te nemen. Welke specifieke omstandigheden hiervoor geschikt zijn (zoals specifieke wegdelen, snelheden of situaties), zal onderzoek moeten uitwijzen.
Niveau 5: overal en altijd zelfrijdend
Dit is de laatste en hoogste trede van de trap naar zelfrijdende voertuigen.
Veel deskundigen denken dat het nog wel even duurt voordat niveau 5 is bereikt. Het Kennisinstituut voor Mobiliteitsbeleid (KiM) maakt hiervoor onderscheid tussen een snel en een langzaam transitiepad. Op het snelle pad komen na 2020 de eerste auto’s van niveau 3 en 4 op de markt. Vanaf dat moment duurt het enkele decennia totdat deze voertuigen een meerderheid binnen het wagenpark vormen. Tegen die tijd komt niveau 5 op de markt. Die zijn dan naar verwachting in de meerderheid vanaf pakweg 2065. Het langzame pad gaat uit van technische beperkingen. Daarbij laat een doorbraak van niveau 3 en 4 tot circa 2045 op zich wachten en verschijnt niveau 5 pas vanaf 2085.
Van idee tot markt
Elk systeem doorloopt een ontwikkelingsproces voordat het op de markt wordt gebracht. Een idee leidt tot technologie, die eerst in een laboratoriumomgeving en vervolgens in de praktijk wordt getest. Als het systeem voldoende uit-ontwikkeld is, wordt het op de markt gebracht. Dit ontwikkelproces is ook van toepassing op de zelfrijdende auto. In de afbeelding hieronder is dit schematisch weergegeven.
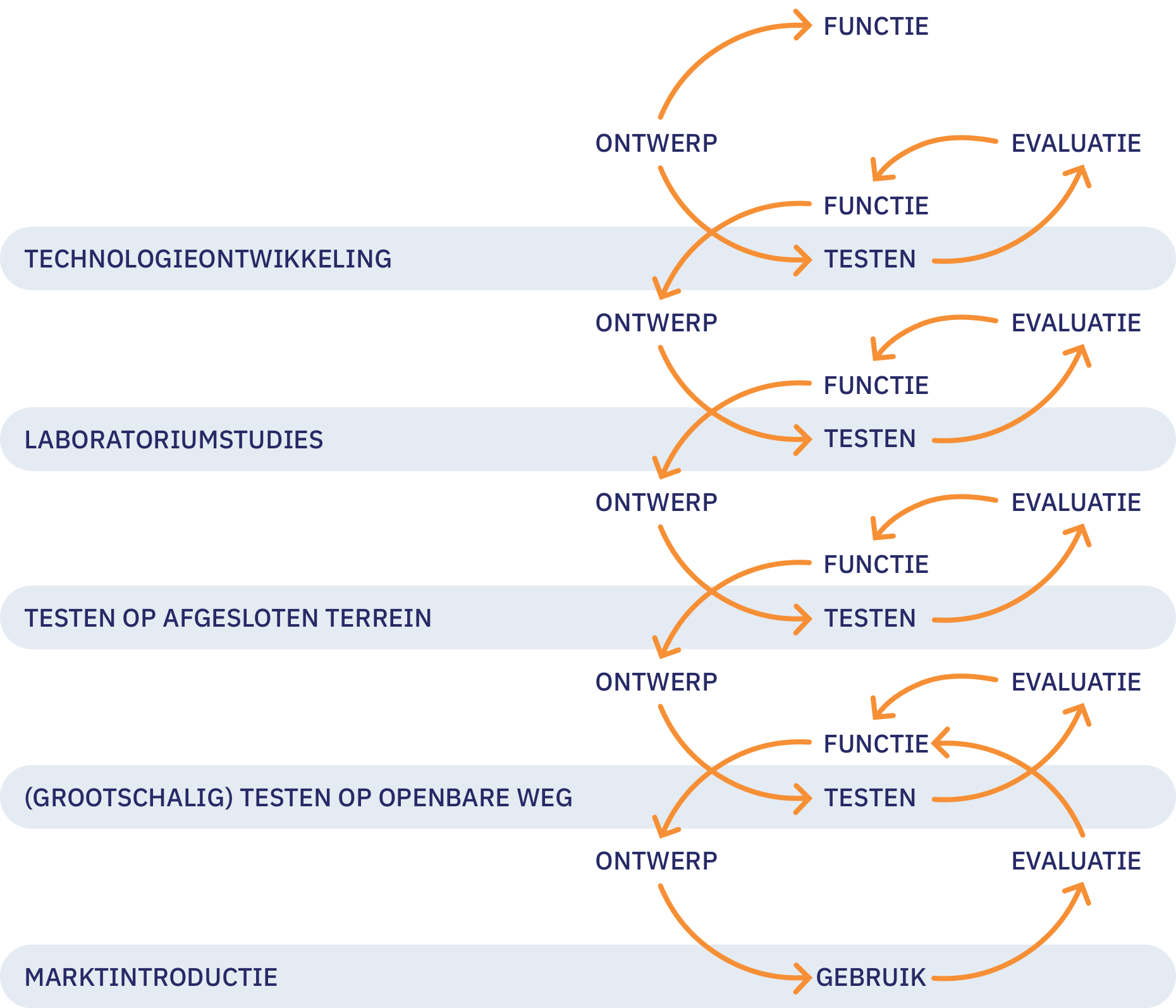
In deze keten van idee tot marktintroductie kan veel fout gaan. Dit kan grote financiële en maatschappelijke schade veroorzaken, vooral als het laat in de keten gebeurt. Dat zou bijvoorbeeld kunnen als mensen anders omgaan met het product dan gedacht, of als de productie niet snel genoeg kan worden opgeschaald.
ICT-sector
De zelfrijdende auto wordt vaak in één adem genoemd met bedrijven als Google, Tesla en Uber. Niet voor niets, want het zijn vooral ICT-ontwikkelingen die zelfrijdende systemen mogelijk maken. In de ICT-sector gaan productontwikkeling en -gebruik veel meer gelijk op. In de traditionele auto-industrie ligt het ontwikkeltempo van nieuwe modellen over het algemeen een stuk lager. Dit heeft onder meer te maken met de ontwikkelingskosten van nieuwe technologie, die over een langere periode moeten worden terugverdiend. Autofabrieken en productielijnen moeten jarenlang meegaan om rendabel te zijn. Partijen die het beste van beide werelden weten te verenigen, zullen in het voordeel zijn.
Veilig of niet?
Hoewel ongevallen met experimentele zelfrijdende auto’s weinig voorkomen, hebben een paar recente ongevallen (Tesla, Uber) veel aandacht gekregen. Hierdoor rijst ook de vraag of de ontwikkeling van de zelfrijdende auto niet te snel gaat. In de figuur hieronder zijn de mogelijke veiligheidsconsequenties van zelfrijdende auto’s per fase van een ongeval weergegeven.
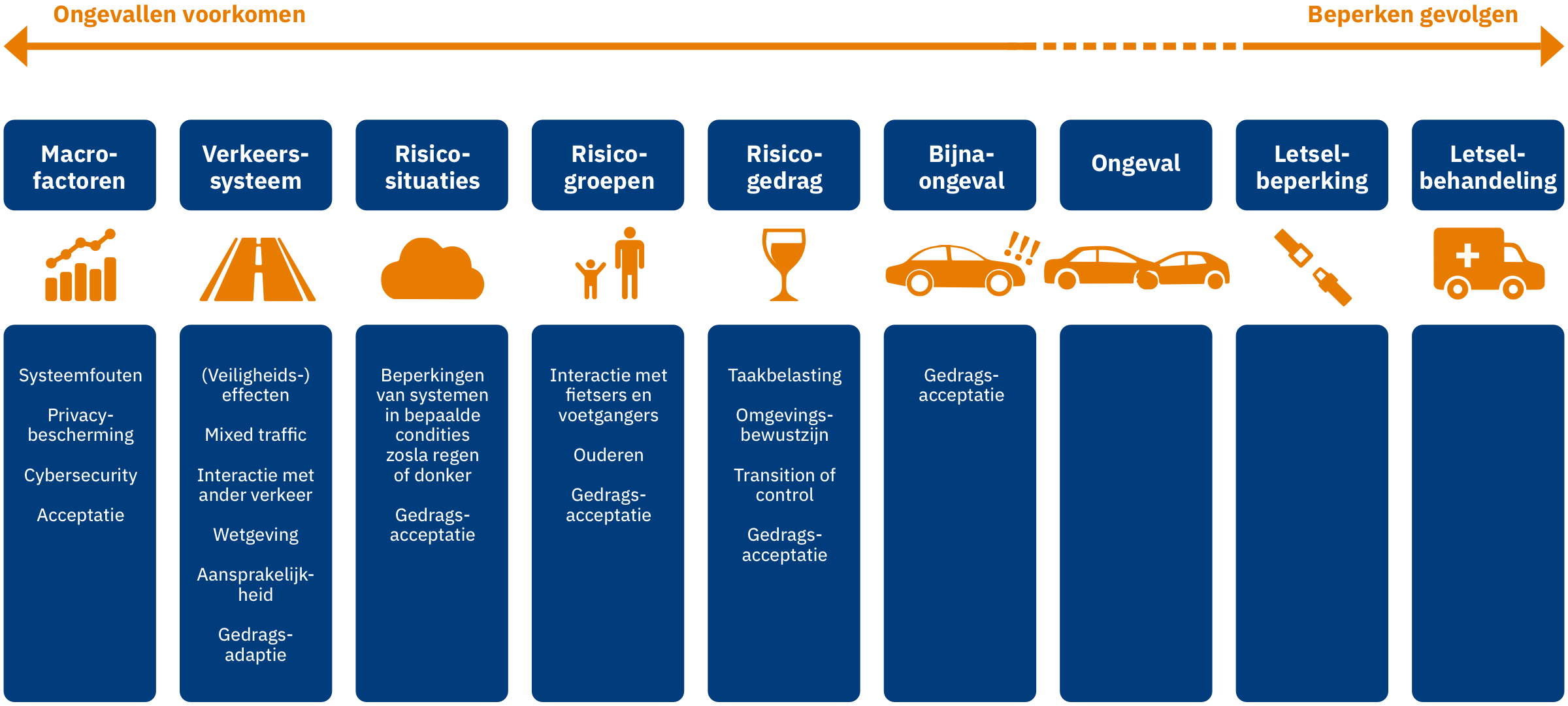
Menselijk gedrag
Paradoxaal genoeg zien we dat de veiligheidsrisico’s van nieuwe systemen – en dus ook van de zelfrijdende auto – vooral worden bepaald door menselijk gedrag. Een (deels) zelfrijdende auto vraagt om andere vaardigheden van de bestuurder. Mensen zijn bijvoorbeeld niet zo goed in supervisie waarbij ze niet zelf rijden, maar wel moeten opletten of de auto het zelf goed doet. Ook blijkt het lastig om snel en effectief het stuur over te nemen als je iets anders aan het doen was (transition of control). Verder kunnen andere verkeersdeelnemers verrast worden door de zelfrijdende auto en hier anders op reageren, bijvoorbeeld omdat deze zich anders gedraagt dan menselijke bestuurders zouden doen.
Zelfrijdend: duurzaam veilig?
Mensen zijn kwetsbaar en maken fouten. Daarom moet het verkeerssysteem zo zijn ingericht dat menselijke fouten niet leiden tot ernstig letsel. Dat is de basis van de safe system approach, die internationaal als de gouden standaard voor een veilig verkeerssysteem wordt gezien. In Nederland is deze systeemaanpak de basis van de Duurzaam Veilig-visie, die onlangs is geactualiseerd.
Zelfrijdende systemen sluiten hier in principe uitstekend bij aan: ze helpen mensen in situaties waar ze fouten (kunnen) maken. Het is dan wel zaak dat die ondersteuning goed aansluit bij de capaciteiten en verwachtingen van de bestuurder en de overige weggebruikers. Dat zegt ook het internationale transportforum van de OECD in een recent uitgebracht rapport. Eerdere genoemde voorbeelden als Autopilot en transition of control laten echter zien dat dit nog lang niet altijd vanzelfsprekend is.
Twijfels en acceptatie
Een literatuurstudie van SWOV laat zien dat met name voetgangers en fietsers er niet van overtuigd zijn dat ze altijd op tijd worden ‘gezien’ door een zelfrijdende auto. En er zijn meer twijfels en onzekerheden. Systemen die zelfrijdende auto’s mogelijk maken, kunnen fouten bevatten, gehackt worden of ongewenst privégegevens opslaan. Er kunnen ook andere ethische kwesties spelen, bijvoorbeeld als de auto bij een onvermijdelijk ongeval een slachtoffer moet ‘kiezen’ (bestuurder of opponent?). Bij een ongeval moet iemand betalen: de bestuurder of de fabrikant? Uit onderzoek van de TU Delft komt naar voren dat men vier tot vijf keer minder ongevallen accepteert van een zelfrijdende auto.
Een andere, minstens zo belangrijke vraag betreft de acceptatie: willen we de zelfrijdende auto wel? Zijn we bereid ervoor te betalen? Is de privacy voldoende gewaarborgd? De auto is een handig vervoermiddel, maar ook – of soms vooral – emotie, status en identiteit. Voor de een betekent dit dat zelfrijdende functies vooral op de achtergrond moeten ‘meerijden’. Alleen als een ongeval dreigt, grijpt de auto als een beschermengel in. Voor de ander zal de zelfrijdende auto alleen een succes worden als het betaalbaar is voor iedereen. Vanwege de hoge verwachte prijs kan dat alleen door de zelfrijdende auto met anderen te delen.
Toekomstscenario’s
Wat de toekomst brengt, weet niemand. Daarom heeft het KiM vier toekomstscenario’s gemaakt voor de ontwikkeling van het verkeerssysteem. De scenario’s zijn gebaseerd op twee onzekerheden: het niveau van automatisering en de mate waarin autobezit en autoritten worden gedeeld.
1. Mobility as a Service (MaaS): altijd en overal
Er is een hoge mate van automatisering en van autodelen. Personen worden vervoerd met automatische ‘taxibots’, die buiten de stad parkeren. Er is geen traditioneel openbaar vervoer meer, maar er is een florerende deeleconomie. Ook zijn lopen en fietsen populair
2. Geheel geautomatiseerd, privé en luxe
Er is een hoge mate van automatisering: ‘platoons’ op de snelweg waarbij vrachtwagens via het draadloze netwerk aan elkaar gekoppeld (‘connected’) in colonne rijden en geen chauffeur en mogelijk zelfs geen cabine meer hebben. Er is een lage mate van autodelen. Auto’s van particulieren zijn ook ‘fully connected’ en hebben bijvoorbeeld geen stuur meer. Voor mensen die geen auto hebben, is er een speciaal vervoersysteem in plaats van het traditionele openbaarvervoersysteem.
3. Handen los op de snelweg
In dit scenario is er een beperkte mate van automatisering en een lage mate van autodelen. Het automatisch rijden gebeurt voornamelijk op de snelweg, omdat de technologie niet voldoende is ontwikkeld om automatisch rijden in de stedelijke omgeving mogelijk te
maken. Op de snelweg rijden vrachtwagens in platoons en in de stedelijke omgeving worden automobilisten ondersteund door systemen, maar dienen zij nog wel het voertuig te besturen.
4. Multimodaal en gedeelde automatisering
Een hoge mate van autodelen waarbij niet alleen de auto wordt gedeeld maar ook de ritten. En een beperkte mate van automatisering: er wordt op de snelwegen automatisch gereden maar van volledig geautomatiseerd rijden is geen sprake. Enerzijds omdat er te weinig draagvlak is en anderzijds omdat de technologie niet voldoende is ontwikkeld.
Maatschappelijke effecten
Het KiM heeft ook een kwalitatieve inschatting gemaakt van de maatschappelijke effecten die te verwachten zijn.
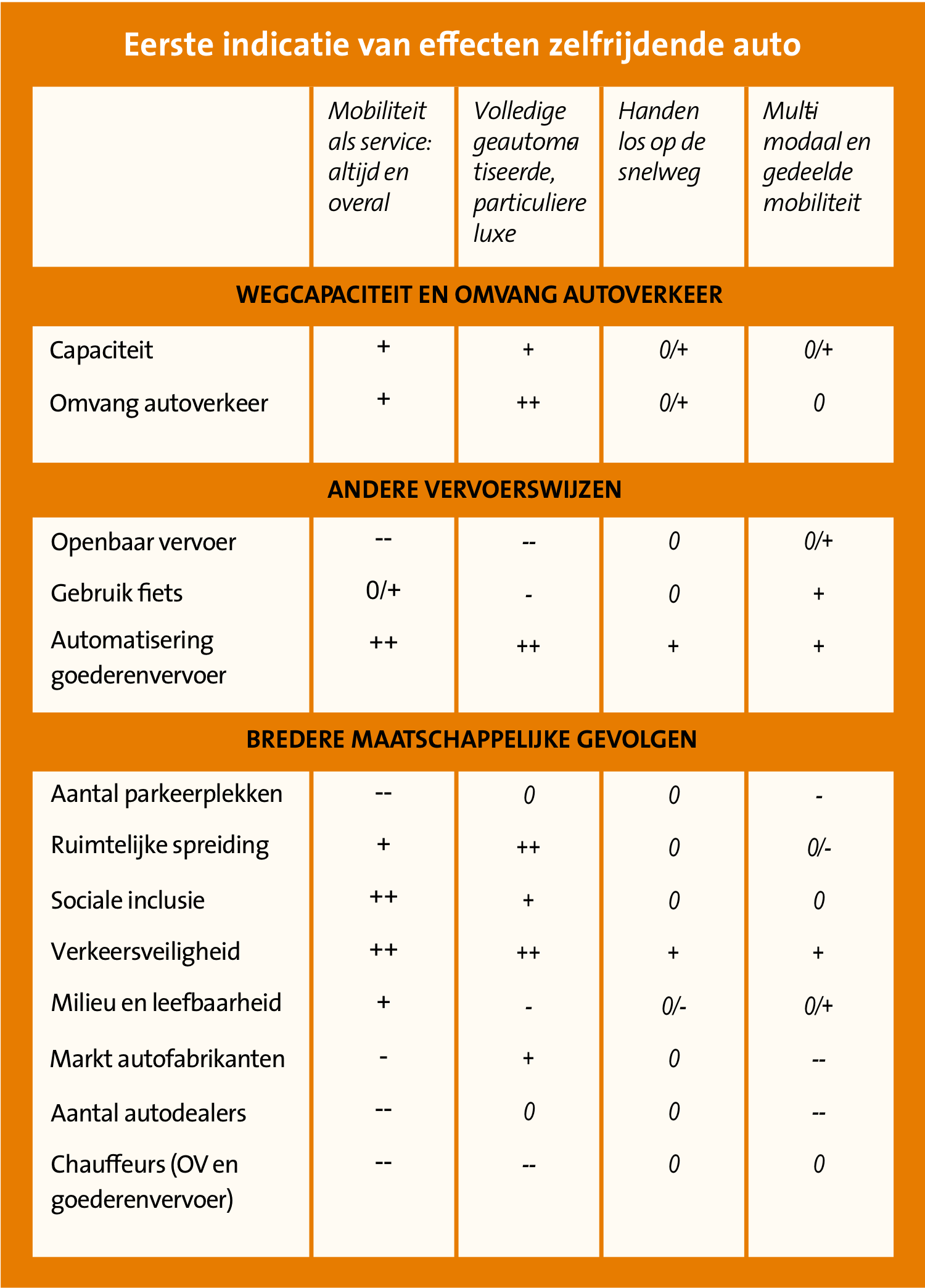
Tabel KiM: Eerste indicatie van effecten zelfrijdende auto
Een paar dingen vallen op. Bij meer autodelen neemt de bereikbaarheid toe (de omvang van het autoverkeer neemt af). Bij meer automatisering neemt de bereikbaarheid juist af, omdat de wegcapaciteit minder hard groeit dan de omvang van het verkeer. Het gebruik van fiets en ov neemt door automatisering af en door autodelen een beetje toe. Voor milieu zijn de effecten wisselend, voor sociale inclusie neutraal tot positief. Het meest valt op dat alleen verkeersveiligheid er in alle gevallen op vooruitgaat. Dat is een logisch gevolg van de aanname dat dat een zelfrijdende auto veiliger is dan een ‘gewone’ auto, ook voor andere verkeersdeelnemers.
Droom of werkelijkheid?
Werken of slapen tijdens het rijden, parkeren buiten de stad, vervoer op maat voor ouderen of gehandicapten, meer verkeersveiligheid: zelfrijdende auto’s kunnen in potentie zorgen voor een nieuwe revolutie in het verkeer. De technologie is niet te stoppen. Maar of en wanneer de zelfrijdende auto echt werkelijkheid wordt voor de consument, is een technisch-maatschappelijke vraag. Dat is nog veel complexer en moeilijker voorspelbaar dan technologie alleen. Maar revolutie of niet, in het drukke Nederlandse verkeer wordt het hoe dan ook een flinke uitdaging.
Copyright: Gemeente Amsterdam